Star Delta starter is the most widely used application especially for Air-compressor and HVAC system.This starter used for 6 or 12 wire for motor terminal depend on electric motor that chosen for the application.
Basically this starter used 3 unit contactor,1 unit timer delay,1 unit overload relay and start/stop button to control the star delta motor.Around the world,it have many types of control circuit design for star delta.
It have different design and technique for the control circuit but the main objective is same,to reduce starting inrush current.
For safety condition for the star delta control circuit,it include with interlock for star and delta sequence to avoid serious damage for electric motor.That mean during star sequence,contactor for delta cannot energize or vise versa.
This post i want share about two types typically used for star delta starter control circuit.It have a pro and contra for each design and it depend on our application and objective for installation.
Types of Star Delta control circuit
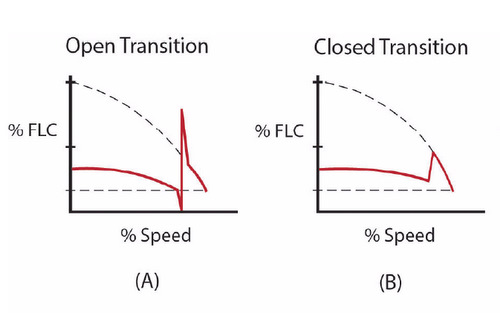
1) Star Delta Open Transition
Firstly i explain why it call OPEN transition because the electrical motor is disconnected from main line when star sequence change to delta for momentarily condition.It include with interlock system for this control circuit.
For this open transition,the advantage is it depend on timing for transition when loading the electric motor.It cause the current surge and the high torque can effected electrical and mechanical due to shock on the application system.
It also can cause the instantaneous current peaks exceed the limit even the locked rotor current for short cycle of rotation.For the electrical aspect it can happen for the instantaneous peaks and could resulted the power fluctuations or losses.
Mechanical aspect it could cause the damage for system component such as drive shaft,bearing or coupling due to torque increased from current spike.
{kind=link}
2) Star Delta Close Transition
This CLOSE transition is an alternative type for star delta starter.The method is same for basic operation but it have additional a few devices to reduce and remove the surge in current matter that faced by OPEN transition type.
For this type,the design have the additional device and component such as a magnetic contactor and power resistors. The advantage of this method is it can eliminated the surge in current problem with high efficiency.
It can reduce a damage for motor winding and mechanical part.Theoretically it can make electric motor have a long life span and save cost for replacement part for mechanical items.For the clear comparision between OPEN and CLOSE transition,please refer to the graph below :
{kind=link}
{kind=link}
View Comments (36)
This topic is very important Thanks for the detailed explanation
Ur welcome...thanks for read my post my friend :D
Can you recommend how to select value of power resistor (Res.)in the closed Star-Delta starter?
RGS,
The resistors must be sized such that considerable current is able to flow in the motor windings while they are in circuit.
The resistors should be sized such that the current through the resistors when in series with the delta configured windings, should be similar to the current through the resistors when connected in star.
Now in market available for Soft starter and VSD to replaced star delta starter..my suggestion is to change to modern starter :D
Thanks Lemau,
Yes, we can use Soft starter or VSD but it's the matter of cost.
Yes..i agreed..soft starter highly cost :D
i would like to know why a star delta motor can trip after running like 5 min?
The question is far too general to answer. Trip the overload protection or the fault protection? Does the trip come from a power system monitoring device? Is the trip a response to a real problem or due to a faulty protective device? Answer these questions to get on the right path to troubleshooting the problem.
What are the reasons for a star delta to chatter(switch on & off) rapidly after 10 hours of normal operation
the reason is simple, voltage drop in your control circuit, especially when your control transformer has the same feeder as your load.
"there is no prima-donna in engineering and possibly cant learn electrical engineering online (source of electrocution)"
keep up, Mr.Lemau, you are doing a lot of help.
dear sir i have a 13 kw dual speed motor which type control panel can use?soft start or normal
Hi,
Motor control is depend on your application.But for the best is you can used VFD - Variable Frequency Drive @ Inverter
I can suggest --> VFD @ inverter
but how can we decide the time when we switch over from star to delta.
Normal practice is around 8 to 10 seconds
The timer should be set to 80-90% of the time the motor needs to reach nominal rpm (normal operating speed under normal load)
The acceleration period must thus be timed, because it will vary depending on the work load.
Set the timer to a minute, and start the motor, with normal load. Time the acceleration very carefully, from start to nominal rpm. set the timer to 90% of acc.time.
If this takes more than 15 sec. to reach nominal rpm, I'd say the motor is too small - power-wise. Normal should be 8 to 12 sec.
Bare in mind that if the motor is connected through an ordinary Star-Delta wiring, there needs to be a short power-pause between switching Star power off and Delta power in. This is due to the fact that the motor needs to get rid of the standing magnetic field in its windings. It will do so in approx 5 periods. If the AC frequency is 50Hz, the pause should be 1/50Hz x 5 = 0,08s = 80ms.
If you leave out this pause, you will get a major current transient. This will bug the electrical neighborhood, and cause wearing on the motor.
Thats good update
Thanks for details.
I have a rather tricky question - regarding the calculation of voltage loss in the Star-Delta main motor wiring.
Example:
Motor current FLC : 10A
Efficiency factor: 0,87
Voltage 230V
Cabling distance: 40m
Max allowed V drop: 3% (6,9V)
Cable 2 cu cables à 3x2,5mm2
Resistivity for Cu: 0,0175
deltaU = (0,0175 x rot3 x (10A x 0,58) x 0,87 x 40) / 2,5mm2 = 4,22V
This is well inside the demand.
Or should both calbes count? 40m x 2
deltaU = (0,0175 x rot3 x (10A x 0,58) x 0,87 x (40x2)) / 2,5mm2 = 8,44V
Now the voltage drop is too high. We need to raise the the copper square mm2 of the cables.
Any tip will be appreciated.
A detailed explanation of the why and how will be deeply appreciated.
The calculations got the best of me - they are some what wrong.
My calc's is done with I=10A not (10A x 0,58)
If we raise the distance to 60m the problem arises correctly.
Then the V.drop for 60m is under the limit and the V.drop for 120m is above.
Sorry for that :-D
thanks for the information, you are realy doing a great job.